")
Სარჩევი:
- ნაბიჯი 1: ნახეთ როგორ მუშაობს ჩემი პროექტი
- ნაბიჯი 2: მიიღეთ ყველა მასალა
- ნაბიჯი 3: ატვირთეთ პროგრამა Arduino დაფაზე
- ნაბიჯი 4: ჩაყარეთ ტრეკები და გააკეთეთ განლაგება
- ნაბიჯი 5: სქემის სქემა ყოველთვის სასარგებლოა
- ნაბიჯი 6: შეაერთეთ ამომრჩევლები L298N დრაივერის დაფის გამოსავალს
- ნაბიჯი 7: შეაერთეთ დენის მიმწოდებლის ბილიკი L298N დრაივერის დაფის სხვა გამოსავალს
- ნაბიჯი 8: შეაერთეთ L298N დრაივერის დაფა არდუინოს დაფის დენის ქინძისთავებთან
- ნაბიჯი 9: შეაერთეთ სენსორი Arduino დაფასთან
- ნაბიჯი 10: შეაერთეთ საავტომობილო დრაივერის შეყვანის ქინძისთავები არდუინოს დაფაზე
- ნაბიჯი 11: მოათავსეთ მატარებელი ბილიკებზე
- ნაბიჯი 12: ჩართეთ კონფიგურაცია
- ნაბიჯი 13: შესრულებულია
- ავტორი John Day day@howwhatproduce.com.
- Public 2024-01-30 10:16.
- ბოლოს შეცვლილი 2025-01-23 14:50.

მატარებლის მოდელების განლაგება დიდი ჰობია, მისი ავტომატიზირება მას ბევრად უკეთესს გახდის! მოდით შევხედოთ მისი ავტომატიზაციის რამდენიმე უპირატესობას:
- დაბალფასიანი ოპერაცია: მთლიანი განლაგება კონტროლდება Arduino მიკროკონტროლით, L298N ძრავის მძღოლის გამოყენებით, მათი ღირებულება თითქმის არაფერია ტრადიციულ მატარებლის კონტროლთან და დენის პაკეტებთან შედარებით.
- იდეალურია ეკრანზე გამოსაყენებლად: ვინაიდან არ არის საჭირო ადამიანის ჩარევა განლაგების კონტროლის შესანარჩუნებლად, შეგიძლიათ გამოიყენოთ ის ჩვენებაზე, სადაც ყოველთვის ვერ იქნებით მატარებლისა და ამომრჩეველთა რაოდენობის გასაკონტროლებლად.
- შესანიშნავია მიკროკონტროლერის მოყვარულთათვის: თუ თქვენ ხართ ან გსურთ დაიწყოთ არდუინოთი და პროგრამირებით, ეს არის დიდი პროექტი თქვენთვის, რომ განახორციელოთ თქვენი ცოდნა.
თუ თქვენ დაინტერესებული ხართ, ასევე შეგიძლიათ შეამოწმოთ ამ პროექტის წინა ვერსია, რომელიც კიდევ უფრო მარტივია.
ასე რომ, ყოველგვარი გატაცების გარეშე, დავიწყოთ!
ნაბიჯი 1: ნახეთ როგორ მუშაობს ჩემი პროექტი


ნაბიჯი 2: მიიღეთ ყველა მასალა

დასაწყებად, დარწმუნდით, რომ გაქვთ ყველა ქვემოთ ჩამოთვლილი:
- სასურველია Arduino მიკროკონტროლის დაფა, UNO.
- L298N ორმაგი H- ხიდის ძრავის მძღოლის დაფა.
- 6 მამრობითი და მამრობითი მხტუნავი მავთულები.
- 7 მამრობითი და მდედრობითი მხტუნავი მავთული.
- ხრახნიანი.
- 12 ვოლტ-დენის კვების ბლოკის ადაპტერი.
- ტრეკის სეგმენტი IR სიახლოვის სენსორით მიმაგრებული ქვედა მხარეს (მე გამოვიყენე Kato S62 სიმღერა)
ნაბიჯი 3: ატვირთეთ პროგრამა Arduino დაფაზე
ჩამოტვირთეთ Arduino IDE აქედან, თუ ის თქვენს კომპიუტერში არ გაქვთ. შემდეგ გადმოწერეთ და გახსენით მოცემული ფაილი.
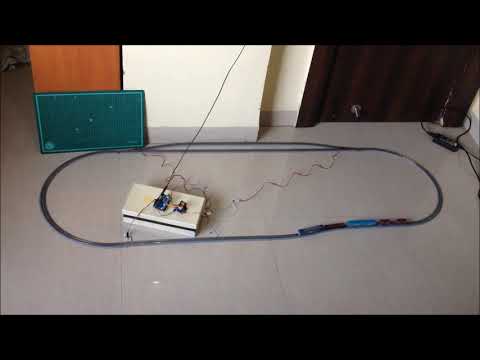
ნაბიჯი 4: ჩაყარეთ ტრეკები და გააკეთეთ განლაგება

გააკეთეთ ოვალური მარყუჟი გამავალი გვერდითი ნაწილებით, როგორც ზემოთ ნაჩვენებია. დარწმუნდით, რომ მანძილი სენსორულ ბილიკსა და მატარებლის პირველ ამობრუნებას შორის სენსორული ბილიკის გადაკვეთის შემდეგ უფრო დიდია ვიდრე მატარებლის სიგრძე, ისე რომ მატარებლის არცერთი ნაწილი არ იყოს სენსორულ ბილიკზე როდესაც იგი გადაკვეთს ამომრჩეველს.
ნაბიჯი 5: სქემის სქემა ყოველთვის სასარგებლოა

დააწკაპუნეთ სურათზე სრული სანახავად. სანამ გააგრძელებთ, დარწმუნდით, რომ გაივლით სრულ სქემას და ყველა დეტალს.
ნაბიჯი 6: შეაერთეთ ამომრჩევლები L298N დრაივერის დაფის გამოსავალს




შეაერთეთ ორივე ამომრჩევლის წითელი და შავი მავთულები შესაბამისად ერთმანეთთან, რის შედეგადაც მიიღება პარალელური კავშირი. შემდეგ, წითელი მავთულები დაუკავშირეთ out4- ს და შავი მავთულები საავტომობილო მძღოლის დაფის out3 ტერმინალს.
ნაბიჯი 7: შეაერთეთ დენის მიმწოდებლის ბილიკი L298N დრაივერის დაფის სხვა გამოსავალს


შეაერთეთ კვების ბლოკის თეთრი მავთული out1- თან და ლურჯი მავთული საავტომობილო დრაივერის დაფის out2 ტერმინალთან.
ნაბიჯი 8: შეაერთეთ L298N დრაივერის დაფა არდუინოს დაფის დენის ქინძისთავებთან

შეაერთეთ 12 ვოლტიანი პინი არდუინოს დაფის VIN პინთან, GND პინდი არდუინოს დაფის GND პინთან და სასურველია, ძრავის მძღოლის 5 ვოლტიანი პინი არდუინოს დაფის 5 ვოლტ პინთან.
ნაბიჯი 9: შეაერთეთ სენსორი Arduino დაფასთან

შეაერთეთ სენსორის VCC პინდი Arduino დაფის 5 ვოლტ პინთან, GND პინ არდუინოს დაფის GND პინთან და OUT პინ არდუინოს დაფის A0 პინთან.
ნაბიჯი 10: შეაერთეთ საავტომობილო დრაივერის შეყვანის ქინძისთავები არდუინოს დაფაზე

შეაერთეთ არდუინოს დაფის ციფრული ქინძისთავები საავტომობილო მძღოლის დაფის შესასვლელთან შემდეგნაირად:
- D9 დან IN1- მდე
- D10 დან IN2
- D11- დან IN3- მდე
- D12 დან IN4- მდე
ნაბიჯი 11: მოათავსეთ მატარებელი ბილიკებზე

გაყვანილობის ყველა კავშირის შემოწმების შემდეგ, მატარებელი მოათავსეთ გვერდით.
ნაბიჯი 12: ჩართეთ კონფიგურაცია

გაააქტიურეთ კონფიგურაცია და დარწმუნდით, რომ ამომრჩევლები გადადიან გვერდითა მხარეზე, თუ არა, უბრალოდ შეცვალოთ საავტომობილო დრაივერთან ამომრჩეველთა კავშირები. ასევე, დარწმუნდით, რომ მატარებელი იწყებს მოძრაობას წინსვლის მიმართულებით. შეცვალეთ მიმწოდებლის კავშირი ძრავის მძღოლთან, თუ მატარებელი არასწორი მიმართულებით მოძრაობს.
ნაბიჯი 13: შესრულებულია
პროექტი დასრულებულია, ჯერჯერობით. თქვენ შეგიძლიათ შეურიგდეთ Arduino კოდს, რომ შეცვალოთ განლაგების ფუნქციონირება, დაამატოთ მეტი გვერდი, ეს ყველაფერი მორგებულია! მე სიამოვნებით ვიცნობ ამ პროექტში განხორციელებული ნებისმიერი ცვლილების შესახებ, შემატყობინეთ ქვემოთ მოცემულ კომენტარებში. Ყველაფერი საუკეთესო!
გირჩევთ:
ავტომატური მოდელის რკინიგზის განლაგება მუშაობს ორი მატარებლით (V2.0) - არდუინოზე დაფუძნებული: 15 ნაბიჯი (სურათებით)
 - არდუინოზე დაფუძნებული: 15 ნაბიჯი (სურათებით)")
ავტომატური მოდელის რკინიგზის განლაგება მუშაობს ორი მატარებლით (V2.0) | Arduino დაფუძნებული: რკინიგზის მოდელის განლაგების ავტომატიზაცია Arduino მიკროკონტროლერების გამოყენებით არის მიკროკონტროლერების შერწყმის, პროგრამირებისა და რკინიგზის მოდელის ერთ ჰობად გაერთიანების შესანიშნავი გზა. არსებობს რამოდენიმე პროექტი, რომელიც ეხება მატარებლის ავტონომიურ მოდელს რკინიგზაზე
რკინიგზის მარტივი ავტომატური მოდელის განლაგება - Arduino კონტროლირებადი: 11 ნაბიჯი (სურათებით)
")
რკინიგზის მარტივი ავტომატური მოდელის განლაგება | Arduino კონტროლირებადი: Arduino მიკროკონტროლერები შესანიშნავი დამატებაა მოდელის რკინიგზისთვის, განსაკუთრებით მაშინ, როდესაც საქმე ავტომატიზაციას ეხება. აქ არის მარტივი და მარტივი გზა მოდულის რკინიგზის ავტომატიზაციის დასაწყებად Arduino– ით. ასე რომ, ყოველგვარი ზედმეტი განცხადების გარეშე, დავიწყოთ
რკინიგზის ავტომატური მოდელის განლაგება უკუ მარყუჟებით: 14 ნაბიჯი

რკინიგზის ავტომატური მოდელის განლაგება უკუ მარყუჟებით: ერთ -ერთ ჩემს წინა ინსტრუქციაში მე ვაჩვენე, თუ როგორ უნდა გაკეთდეს რკინიგზის მარტივი ავტომატური წერტილი წერტილის მოდელის მიმართულებით. ამ პროექტის ერთ -ერთი მთავარი მინუსი ის იყო, რომ მატარებელს საპირისპირო მიმართულებით უნდა გადაეყვანა საწყის წერტილში დასაბრუნებლად. რ
მოდელის რკინიგზის განლაგება ავტომატური გასასვლელი გვერდით (V2.0): 13 ნაბიჯი (სურათებით)
: 13 ნაბიჯი (სურათებით)")
მოდელის რკინიგზის განლაგება ავტომატური გასასვლელი ბილიკით (V2.0): ეს პროექტი არის რკინიგზის ავტომატიზაციის ერთ -ერთი წინა მოდელის, რკინიგზის მოდელის განლაგება ავტომატური გადახურვით. ეს ვერსია ამატებს მოძრავი შემადგენლობით ლოკომოტივის შეერთების და გათიშვის მახასიათებელს. ოპერაცია
ავტომატური მოდელის რკინიგზის განლაგება მუშაობს ორი მატარებლით: 9 საფეხური

რკინიგზის ავტომატური მოდელის განლაგება, რომელიც მუშაობს ორი მატარებლით: მე გავაკეთე ავტომატური მოდელის მატარებლის განლაგება გასვლის გვერდით ცოტა ხნის წინ. თანამემამულე წევრის თხოვნით, მე ეს ინსტრუქციულად გავაკეთე. ეს გარკვეულწილად წააგავს ადრე ნახსენები პროექტს. განლაგება იტევს ორ მატარებელს და მათ ალტერნატიულად მართავს