![[vPython] ობობის რობოტის სიმულატორი: 4 ნაბიჯი](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] ობობის რობოტის სიმულატორი: 4 ნაბიჯი")
Სარჩევი:
- ავტორი John Day day@howwhatproduce.com.
- Public 2024-01-30 10:20.
- ბოლოს შეცვლილი 2025-06-01 06:09.


თუ თქვენთვის საინტერესოა ჩემი დიზაინი, შეგიძლიათ გააკეთოთ მცირე შემოწირულობა:
მე ვიყენებ vPython- ს ჩემი ობობის რობოტის მოქმედებების სიმულაციისთვის. ეს ადვილად განავითარებს თქვენს ინტერესთა მოქმედებებს კომპიუტერში/მაკზე, შემდეგ კი პორტში არდუინოში.
არსებობს ნამდვილი რობოტი, თუ ის გაინტერესებთ
www.instructables.com/id/DIY-Spider-RobotQu…
VPython არის პითონის პროგრამირების ენა პლუს 3D გრაფიკული მოდული სახელწოდებით "ვიზუალური", რომელიც შეიქმნა დევიდ შეერის მიერ 2000 წელს. VPython აადვილებს ნავიგაციური 3D დისპლეის და ანიმაციის შექმნას, თუნდაც პროგრამირების შეზღუდული გამოცდილების მქონე პირთათვის. რადგან ის დაფუძნებულია პითონზე, მას ასევე აქვს ბევრი შეთავაზება გამოცდილი პროგრამისტებისთვის და მკვლევარებისთვის.
ნაბიჯი 1: დააინსტალირეთ VPython და Editor


დააინსტალირეთ პითონი , მე გირჩევთ გამოიყენოთ 2.7.x
www.python.org/
და შემდეგ vpython
vpython.org/
და, ჩემი საყვარელი რედაქტორი - PyCharm
www.jetbrains.com/pycharm/
ნაბიჯი 2: ჩამოტვირთეთ კოდი და გაუშვით

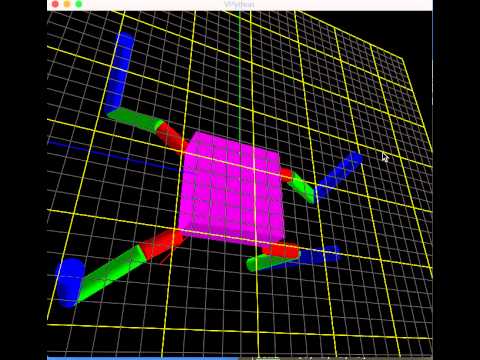
გადმოწერეთ კოდი და გახსენით PyCharm- ით, გაუშვით კოდი და ეკრანზე დაინახავთ ლამაზი 3D ობობის რობოტს, ხოლო შუა ღილაკით შეგიძლიათ გამოიყენოთ მაუსი გასადიდებლად/გასადიდებლად, მარჯვენა ღილაკი კი როტაციისთვის.
ნაბიჯი 3: შეიმუშავეთ თქვენი ქმედებები ამ სიმულატორში
სახალისო იქნება თუ შეგიძლია განავითარო უფრო საინტერესო მოქმედებები და გამიზიარო.
ნაბიჯი 4: დისტანციური მართვა ნამდვილ ობობას რობოტზე
რაც შეეხება პითონის მიერ შექმნილი ნამდვილი რობოტის კონტროლს bluetooth? თქვენ შეიძლება უკვე გინდოდეთ გზის გამოცდა. მოგვიანებით დავდებ თუ ვინმეს დასჭირდება.
გირჩევთ:
DIY RACING GAME სიმულატორი -- F1 სიმულატორი: 5 ნაბიჯი

DIY RACING GAME სიმულატორი || F1 სიმულატორი: მოგესალმებით ყველას კეთილი იყოს თქვენი მობრძანება ჩემს არხზე, დღეს მე ვაპირებ გაჩვენოთ, როგორ ვაშენებ " რბოლის თამაშის სიმულატორს " Arduino UNO– ს დახმარებით. ეს არ არის ასაწყობი ბლოგი, ის მხოლოდ სიმულატორის მიმოხილვა და გამოცდაა. სრული ბლოგის შექმნა მალე დაიდება
"მილი" ოთხფეხა ობობის რობოტი: 5 ნაბიჯი

"მაილსი" ოთხფეხა ობობის რობოტი: დაფუძნებულია არდუინო ნანოზე, მაილსი არის ობობა რობოტი, რომელიც იყენებს თავის 4 ფეხს სიარულისა და მანევრისთვის. იგი იყენებს 8 SG90 / MG90 Servo ძრავას, როგორც ფეხის ამძრავებს, შედგება პერსონალური PCB- სგან, რომელიც შექმნილია სერვოებისა და არდუინო ნანოს ენერგიისა და კონტროლისთვის. PCB– ს აქვს მიძღვნილი
ოთხფეხა ობობის რობოტი - GC_MK1: 8 ნაბიჯი (სურათებით)
")
ოთხკუთხა ობობის რობოტი - GC_MK1: ობობა რობოტი a.k.a. GC_MK1 მოძრაობს წინ და უკან და ასევე შეუძლია ცეკვა არდუინოზე დატვირთული კოდის მიხედვით. რობოტი იყენებს 12 მიკრო სერვო ძრავას (SG90); 3 თითოეული ფეხისთვის. კონტროლერი, რომელიც გამოიყენება სერვო ძრავების გასაკონტროლებლად არის Arduino Nan
[წვრილმანი] ობობის რობოტი (Quad Robot, Quadruped): 14 ნაბიჯი (სურათებით)
![[წვრილმანი] ობობის რობოტი (Quad Robot, Quadruped): 14 ნაბიჯი (სურათებით)](https://i.howwhatproduce.com/images/001/image-1641-34-j.webp "[წვრილმანი] ობობის რობოტი (Quad Robot, Quadruped): 14 ნაბიჯი (სურათებით)")
[წვრილმანი] ობობის რობოტი (Quad Robot, Quadruped): თუ თქვენ გჭირდებათ ჩემგან დამატებითი მხარდაჭერა, უკეთესი იქნება, რომ შემომთავაზოთ შესაბამისი შემოწირულობა: http: //paypal.me/RegisHsu2019-10-10 განახლება: ახალი შემდგენელი გამოიწვევს მცურავი რიცხვის გამოთვლის პრობლემას. მე უკვე შევცვალე კოდი. 2017-03-26
Arduino ავტომატური ობობის ხუმრობა: 7 ნაბიჯი (სურათებით)
")
Arduino– ს ავტომატური ობობის ხუმრობა: ჰელოუინამდე სულ რაღაც 5 დღით ადრე გადავწყვიტე, რომ მინდოდა ხუმრობა გამომეყენებინა შესასვლელ კარებში ხრიკებისთვის. ჩემმა ბავშვებმა ნახეს ერთ-ერთი ტკბილეულის თაიგული ჩემს სამსახურში, სადაც მოძრავი გააქტიურებული ჩონჩხის ხელი ძირს ეცემა, რომ ხელი მოგკიდოთ, როდესაც მიაღწევთ