
Სარჩევი:
- ნაბიჯი 1: ის, რაც ჩვენ გვჭირდება
- ნაბიჯი 2: პროგრამული უზრუნველყოფის ინსტალაცია
- ნაბიჯი 3: დააინსტალირეთ მასალის სლაიდი: გამოიყენეთ დამაკავშირებელი ფირფიტა სტატორისა და მასალის სლაიდების დასაკავშირებლად
- ნაბიჯი 4: დააინსტალირეთ UArm სტატორი (მასალის სლაიდით): დააფიქსირეთ UArm სტატორი კონვეიერის ქამარზე
- ნაბიჯი 5: დააინსტალირეთ ულტრაბგერითი სენსორი: დააფიქსირეთ ულტრაბგერითი სენსორი კონვეიერის ქამარზე
- ნაბიჯი 6: დააინსტალირეთ მთავარი საკონტროლო დაფა: დააფიქსირეთ მთავარი საკონტროლო დაფა კონვეიერის ქამრის ბაზაზე
- ნაბიჯი 7: დააინსტალირეთ UArm Stator: დააფიქსირეთ სხვა სტატორი კონვეიერის ქამარზე
- ნაბიჯი 8: შეაერთეთ ულტრაბგერითი სენსორი: ჩადეთ ულტრაბგერითი სენსორის კაბელი მთავარი საკონტროლო დაფის D10-D11- ში
- ნაბიჯი 9: დააკავშირეთ Line Finder: ჩასვით Line Finder Cord D12-D13 მთავარი საკონტროლო დაფის
- ნაბიჯი 10: შეაერთეთ ფერის სენსორი: ჩადეთ ფერის სენსორის კაბელი მთავარი საკონტროლო დაფის IIC- ში
- ნაბიჯი 11: შეაერთეთ LCD: ჩადეთ LCD კაბელი მთავარი საკონტროლო დაფის IIC– ში
- ნაბიჯი 12: შეაერთეთ კონვეიერის ქამარი: ჩასვით კონვეიერის ქამრის კაბელი მთავარი საკონტროლო დაფის საავტომობილო დისკზე
- ნაბიჯი 13: დააინსტალირეთ UArm Swift Pro: მჭიდროდ მოათავსეთ UArm Swift Pro სტატორზე
- ნაბიჯი 14: შეაერთეთ UArm Swift Pro COM: გამოიყენეთ TYPE-C კაბელი UArm Swift Pro და საკონტროლო დაფის დასაკავშირებლად
- ნაბიჯი 15: დაუკავშირეთ UArm Swift Pro– ს კვების ბლოკი: დაუკავშირეთ Two Swift Pro დენის ტერმინალს
- ნაბიჯი 16: მიმოხილვა
- ნაბიჯი 17: ოპერაცია
- ნაბიჯი 18: Firmware Reset
- ნაბიჯი 19: Firmware ხელახლა დაწერილი
- ნაბიჯი 20: Firmware ხელმეორედ დაწერილი -1: ჩამოტვირთეთ Firmware
- ნაბიჯი 21: Firmware ხელმეორედ დაწერილი -2: შეაერთეთ Mega2560 კომპიუტერს USB კაბელის საშუალებით
- ნაბიჯი 22: Firmware Re-written-3: ჩამოტვირთეთ გარე ბიბლიოთეკები და შეიტანეთ ბიბლიოთეკა
- ნაბიჯი 23: Firmware ხელმეორედ დაწერილი -4: გახსენით Firmware Arduino IDE– ში
- ნაბიჯი 24: Firmware ხელახლა დაწერილი -4: გაგზავნეთ Firmware Arduino Mega2560 პარამეტრებით
- ავტორი John Day day@howwhatproduce.com.
- Public 2024-01-30 10:19.
- ბოლოს შეცვლილი 2025-06-01 06:09.


გამარჯობა ბიჭებო, ეს სასწავლო ინსტრუქცია მიგიყვანთ კონვეიერის ქამრის დაყენების გზით. თუ თქვენ გაქვთ წინასწარი გამოცდილება uArm- ში, კარგია სცადოთ ეს კონვეიერის ქამარი. თუ არ გაქვთ წინასწარი გამოცდილება, ყველაფერი კარგადაა და შეგიძლიათ გაიცნოთ ორივე მათგანი ახლავე! ეს იმიტირებული ასამბლეის ხაზი გაცილებით მეტ სიამოვნებას მოაქვს, ვნახოთ როგორ მუშაობს ამორჩევის ადგილი.
ნაბიჯი 1: ის, რაც ჩვენ გვჭირდება
აპარატურა:
1. კონვეიერის ქამარი და ფერის სენსორი * 1
2. uArm 30P ქვედა გაფართოების ფირფიტა * 2
3. 12V დენის ადაპტერი * 1
4. USB Type C კაბელი * 2 & uArm დენის კაბელი * 1
5. სამიზნე ობიექტი (წითელი და მწვანე და ყვითელი კუბი)* 1
6. ულტრაბგერითი სენსორი * 1
7. LCD * 1
8. საკონტროლო საბჭო * 1
9. მასალა Slide * 1 & Line Finder * 1
10. კავშირის ფირფიტა * 1
11. uArm Swift Pro Stator * 2
პროგრამული უზრუნველყოფა:
1. Arduino IDE
2. conveyor_belt.ino Arduino Mega 2560 -ისთვის
3. UArmSwiftPro_2ndUART.hex uArm- ისთვის
ნაბიჯი 2: პროგრამული უზრუნველყოფის ინსტალაცია

1. ჩამოტვირთეთ hex.
2. ჩამოტვირთეთ და ამოიღეთ XLoader.
3. გახსენით XLoader და აირჩიეთ თქვენი uArm- ის COM პორტი ქვედა მარცხენა მენიუდან.
4. აირჩიეთ შესაბამისი მოწყობილობა ჩამოსაშლელი სიიდან სახელწოდებით "მოწყობილობა".
5. შეამოწმეთ, რომ Xloader- მა დააყენა მოწყობილობის სწორი ბადის სიჩქარე: 115200 მეგაზე (ATMEGA2560).
6. ახლა გამოიყენეთ გვერდის დათვალიერების ღილაკი ფორმის ზედა მარჯვენა კუთხეში თქვენი hex ფაილის დასათვალიერებლად.
7. მას შემდეგ რაც შეარჩიეთ თქვენი ექვსკუთხა ფაილი, დააწკაპუნეთ "ატვირთვაზე" ატვირთვის პროცესს, როგორც წესი, დასჭირდება დაახლოებით 10 წამი. დასრულების შემდეგ, შეტყობინება გამოჩნდება XLoader- ის ქვედა მარცხენა კუთხეში, სადაც გეტყვით რამდენი ბაიტი აიტვირთა. თუ იყო შეცდომა, ის გამოჩნდება ატვირთული მთლიანი ბაიტების ნაცვლად. ნაბიჯები უნდა იყოს მსგავსი და შეიძლება გაკეთდეს ბრძანების ხაზის საშუალებით.
ნაბიჯი 3: დააინსტალირეთ მასალის სლაიდი: გამოიყენეთ დამაკავშირებელი ფირფიტა სტატორისა და მასალის სლაიდების დასაკავშირებლად

ნაბიჯი 4: დააინსტალირეთ UArm სტატორი (მასალის სლაიდით): დააფიქსირეთ UArm სტატორი კონვეიერის ქამარზე
: დააფიქსირეთ UArm სტატორი კონვეიერის ქამარზე")
ნაბიჯი 5: დააინსტალირეთ ულტრაბგერითი სენსორი: დააფიქსირეთ ულტრაბგერითი სენსორი კონვეიერის ქამარზე

ნაბიჯი 6: დააინსტალირეთ მთავარი საკონტროლო დაფა: დააფიქსირეთ მთავარი საკონტროლო დაფა კონვეიერის ქამრის ბაზაზე

ნაბიჯი 7: დააინსტალირეთ UArm Stator: დააფიქსირეთ სხვა სტატორი კონვეიერის ქამარზე

ნაბიჯი 8: შეაერთეთ ულტრაბგერითი სენსორი: ჩადეთ ულტრაბგერითი სენსორის კაბელი მთავარი საკონტროლო დაფის D10-D11- ში

ნაბიჯი 9: დააკავშირეთ Line Finder: ჩასვით Line Finder Cord D12-D13 მთავარი საკონტროლო დაფის

ნაბიჯი 10: შეაერთეთ ფერის სენსორი: ჩადეთ ფერის სენსორის კაბელი მთავარი საკონტროლო დაფის IIC- ში

ნაბიჯი 11: შეაერთეთ LCD: ჩადეთ LCD კაბელი მთავარი საკონტროლო დაფის IIC- ში

ნაბიჯი 12: შეაერთეთ კონვეიერის ქამარი: ჩასვით კონვეიერის ქამრის კაბელი მთავარი საკონტროლო დაფის საავტომობილო დისკზე

ნაბიჯი 13: დააინსტალირეთ UArm Swift Pro: მჭიდროდ მოათავსეთ UArm Swift Pro სტატორზე


ნაბიჯი 14: შეაერთეთ UArm Swift Pro COM: გამოიყენეთ TYPE-C კაბელი UArm Swift Pro და საკონტროლო დაფის დასაკავშირებლად

ნაბიჯი 15: დაუკავშირეთ UArm Swift Pro- ს კვების ბლოკი: დაუკავშირეთ Two Swift Pro დენის ტერმინალს

ნაბიჯი 16: მიმოხილვა

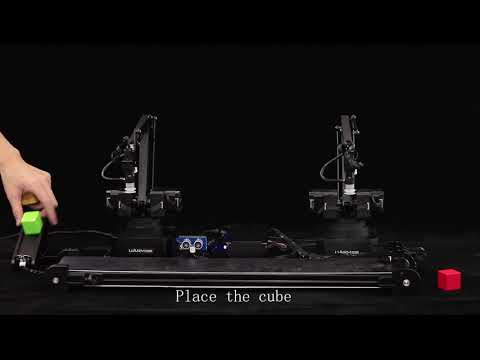
ნაბიჯი 17: ოპერაცია

1. დააჭირეთ uArm დენის ღილაკს.
2. გამოიყენეთ 12V დენის ადაპტერი მთელი სისტემის გასაძლიერებლად.
3. დააჭირეთ სისტემის პანელის გადატვირთვის ღილაკს.
4. განათავსეთ ფერის კუბი მასალის სლაიდზე და დაელოდეთ uArm- ის აყვანას.
ნაბიჯი 18: Firmware Reset

პირველ ეტაპზე, uArm Swift Pro- ს ემატება კონვეიერის ქამრის სპეციალური firmware. uArm- ის კონტროლი შეუძლებელია uArm Studio- ს მიერ. თუ გსურთ uArm- ის კონტროლი uArm Studio- ს გამოყენებით, მიჰყევით ქვემოთ მოცემულ ნაბიჯებს firmware- ის აღსადგენად.
1. შეაერთეთ uArm Swift Pro თქვენს კომპიუტერს, გახსენით XLoader და ჩატვირთეთ swiftpro3.2.0.hex.
2. დააწკაპუნეთ ღილაკზე "ატვირთვა", რომ ატვირთოთ hex uArm Swift Pro- ში.
ნაბიჯი 19: Firmware ხელახლა დაწერილი
Firmware Arduino Mega2560 დაყენებულია მის გაგზავნამდე. თუ საჭიროა firmware- ის ხელახლა ჩაწერა, მიმართეთ შემდეგ ნაბიჯებს.
ნაბიჯი 20: Firmware ხელმეორედ დაწერილი -1: ჩამოტვირთეთ Firmware
ჩამოტვირთეთ conveyor_belt.ino Arduino Mega 2560 -ისთვის
ნაბიჯი 21: Firmware ხელმეორედ დაწერილი -2: შეაერთეთ Mega2560 კომპიუტერს USB კაბელის საშუალებით

ნაბიჯი 22: Firmware Re-written-3: ჩამოტვირთეთ გარე ბიბლიოთეკები და შეიტანეთ ბიბლიოთეკა

ჩამოტვირთეთ გარე ბიბლიოთეკები და შემოიტანეთ ბიბლიოთეკა.
ნაბიჯი 23: Firmware ხელმეორედ დაწერილი -4: გახსენით Firmware Arduino IDE- ში

ნაბიჯი 24: Firmware ხელახლა დაწერილი -4: გაგზავნეთ Firmware Arduino Mega2560 პარამეტრებით

კარგი, ასე მუშაობს. მადლობა თქვენი ინტერესებისთვის, რომ წაიკითხოთ ჩემი ინსტრუქციები კონვეიერის ქამრის დაყენების შესახებ.
იმედია მოგეწონებათ თამაში uArm და კონვეიერის ქამრით! _
შექმნილია UFACTORY გუნდის მიერ
ელ.ფოსტა: info@ Manufactory.cc
ფეისბუქი: @Ufactory2013
ოფიციალური ვებ - გვერდი: www.ufactory.cc
გირჩევთ:
ჩემი ლაზერული ჭრის Ray-Gun შეკრების ინსტრუქცია: 10 ნაბიჯი

ჩემი ლაზერული ჭრის Ray-Gun შეკრების ინსტრუქციები: ბოდიშს გიხდით დაგვიანებისთვის, აქ არის ჩემი დიდი ხნის ვადაგადაცილებული ინსტრუქცია, თუ როგორ უნდა შევიკრიბოთ Laser Pointer Ray-Gun, თქვენ შეგიძლიათ შეიძინოთ ვექტორული ნახაზის გეგმები, მისი დამზადებისთვის … CNC– ზე ლაზერული საჭრელი! Https: //cults3d.com/en/3d-model/gadget/ray-gun აი ასე
ააშენეთ მინი კონვეიერის ქამარი როგორც სლინკი მანქანა: 7 ნაბიჯი (სურათებით)
")
ააშენეთ მინი კონვეიერის ქამარი როგორც სლინკი მანქანა: ეს პატარა პროექტი იყენებს ყვითელ გადაცემულ ძრავას, რათა გააძლიეროს PVC მილისგან დამზადებული 1 ფუტიანი გრძელი კონვეიერის ქამარი, 1 -დან 4 -მდე ფიჭვის ხე და მხატვრის ტილო (ქამრისთვის). რამდენიმე ვერსია გამოვიარე, სანამ ის დაიწყებდა მუშაობას, გავაკეთე მარტივი და აშკარა შეცდომა
Veedooo პროგრამირების რობოტული მანქანის შეკრების ინსტრუქცია: 7 ნაბიჯი

Veedooo პროგრამირების რობოტული მანქანის შეკრების ინსტრუქცია: პაკეტების სია
Overkill კონვეიერის სისტემა: 8 ნაბიჯი

Overkill კონვეიერის სისტემა: ეს სასწავლო ინსტრუქცია აჩვენებს, თუ როგორ უნდა მოხდეს ჭარბი ტარების კონვეიერის ქამარი რობოტ-სისტემა, რომელიც შედგება ერთი კონვეიერის ქამრისგან, plc- სგან, ორი რობოტისგან და Pixy კამერისგან. სისტემის ფუნქციაა კონვეიერისგან მიიღოს ფერადი ობიექტი და გადასცეს რობოტი 1 -დან რობოტს
TIVA კონტროლირებადი კონვეიერის ქამარი დაფუძნებული ფერის სორტირება: 8 ნაბიჯი

TIVA კონტროლირებადი კონვეიერის ქამარი დაფუძნებული ფერის დამლაგებელი: ელექტრონიკის სფეროს აქვს უზარმაზარი გამოყენება. ყველა პროგრამას სჭირდება განსხვავებული წრე და განსხვავებული პროგრამული უზრუნველყოფა, ასევე აპარატურის კონფიგურაცია. მიკროკონტროლი არის ჩიპში ჩამონტაჟებული ინტეგრირებული მოდელი, რომელშიც შესაძლებელია სხვადასხვა პროგრამის გაშვება