")
Სარჩევი:
- ნაბიჯი 1: როგორ მუშაობს დოზა
- ნაბიჯი 2: გთხოვთ გაითვალისწინოთ დაწყებამდე
- ნაბიჯი 3: შეაგროვეთ ყველა მასალა
- ნაბიჯი 4: ვარიუს ზომები
- ნაბიჯი 5: სხეულის შექმნა
- ნაბიჯი 6: აქტივატორის შეკრება და ფირფიტის დამზადება
- ნაბიჯი 7: ტალღის მახასიათებლების მანიპულაცია
- ნაბიჯი 8: ელექტრონული კავშირები და პროგრამა
- ნაბიჯი 9: აქტივატორების კონტროლი მენიუზე ორიენტირებული პროგრამით
- ნაბიჯი 10: როგორ ვიმუშაოთ ტალღის ავზი
- ავტორი John Day day@howwhatproduce.com.
- Public 2024-01-30 10:19.
- ბოლოს შეცვლილი 2025-06-01 06:09.



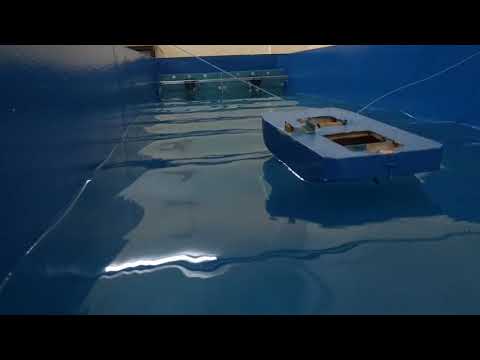
ტალღის ავზი არის ლაბორატორიული მოწყობილობა ზედაპირული ტალღების ქცევაზე დაკვირვებისათვის. ტიპიური ტალღის ავზი არის ყუთი სავსე თხევადი, ჩვეულებრივ წყლით, ტოვებს ღია ან ჰაერით სავსე სივრცეს თავზე. ტანკის ერთ ბოლოში აქტივატორი წარმოქმნის ტალღებს; მეორე ბოლოს ჩვეულებრივ აქვს ტალღის შთამნთქმელი ზედაპირი.
ჩვეულებრივ, ეს ტანკები ღირს ბევრი ფული, ამიტომ მე შევეცადე მე ნამდვილად იაფი გამოსავალი გამეჩინა იმ სტუდენტებისთვის, რომელთაც სურთ ტანკი გამოიყენონ თავიანთი პროექტების შესამოწმებლად.
ნაბიჯი 1: როგორ მუშაობს დოზა
ასე რომ, პროექტი შედგება ორი გამტარებლისგან, რომლებიც დამზადებულია v- სლოტინის ალუმინის ექსტრუზიის გამოყენებით.
სტეპერიანი ძრავა დაკავშირებულია თითოეულ ამძრავთან და ორივე ძრავა კონტროლდება ერთი და იმავე სტეპერიანი ძრავით, ასე რომ არ არსებობს ჩამორჩენა.
არდუინო გამოიყენება ძრავის მძღოლის გასაკონტროლებლად. მენიუზე ორიენტირებული პროგრამა გამოიყენება კომპიუტერის საშუალებით დაკავშირებულ არდაუნიაში. მამოძრავებელი ფირფიტები დამონტაჟებულია v-slot gantry რომელიც წავა წინ და უკან ძრავების დაწყებისთანავე და ფირფიტების ეს წინ და უკან მოძრაობა წარმოქმნის ტალღებს ავზის შიგნით. ტალღის სიმაღლე და სიგრძე შეიძლება შეიცვალოს სიჩქარის შეცვლით ძრავა არდუინოს საშუალებით.
ნაბიჯი 2: გთხოვთ გაითვალისწინოთ დაწყებამდე

მე არ განვიხილე წვრილმანების უმრავლესობა, თუ როგორ გამოვიყენო არდუინო ან როგორ შედუღება, რომ ეს გაკვეთილი იყოს პატარა და ადვილად გასაგები. დაკარგული ნივთების უმეტესობა გაწმენდილია სურათებსა და ვიდეოებში. გთხოვთ მომწეროთ, თუ რაიმე პრობლემა ან შეკითხვა გაქვთ პროექტთან დაკავშირებით.
ნაბიჯი 3: შეაგროვეთ ყველა მასალა
- Arduino მიკროკონტოლერი
- 2*სტეპერიანი ძრავა (2.8 კგ სმ ბრუნვის მომენტი ძრავზე)
- 1*სტეპერი ძრავის მძღოლი
- 2*V სლოტი განტარის სისტემა
- ფოლადის ან რკინის ფირფიტები სატანკო სხეულისთვის
- L- გამაძლიერებლები სხეულის მხარდასაჭერად
- ბოჭკოვანი ან პლასტმასის ფურცელი გამააქტიურებელი ფირფიტის დასამზადებლად
- მავთულები 48 ვოლტი DC დენის წყაროს
მე არ ჩავრთე მასალები v-slot gantry რადგან სია იქნება ძალიან დიდი მაშინ უბრალოდ google v-slot თქვენ მიიღებთ ბევრ ვიდეოს იმის შესახებ თუ როგორ უნდა ააწყოთ მე გამოვიყენე 2040 ალუმინის ექსტრუზია. ძრავის სიმძლავრე და ელექტროენერგიის მიწოდება შეიცვლება, თუ გსურთ მეტი ტვირთის გადატანა.
სატანკო ზომები
სიგრძე 5.50 მ
სიგანე 1.07 მ
სიღრმე 0.50 მ
ნაბიჯი 4: ვარიუს ზომები



იმისათვის, რომ საქმეები უფრო მარტივი და სამეურვეო იყოს მოკლედ, მე გადავიღე სხვადასხვა კომპონენტის სურათები მასშტაბით, ასე რომ თქვენ შეგიძლიათ ნახოთ მათი ზომები.
ნაბიჯი 5: სხეულის შექმნა




სხეული დამზადებულია 3 მმ სისქის თუჯის ფურცლით.
სატანკო სიგანე არის 1.10 მეტრი, სიგრძე 5 მეტრი და სიმაღლე 0.5 მეტრი.
სატანკო კორპუსი დამზადებულია რბილი ფოლადისგან, გამყარებებით, სადაც საჭიროა. რბილი ფოლადის ფირფიტები მოხრილი და დაჭრილი იყო სხვადასხვა მონაკვეთზე სატანკო ზომების მიხედვით. ეს მონაკვეთები შემდეგ აღმართეს მათ ერთმანეთთან შედუღებით. გამკაცრებლები ასევე შედუღებული იყო, რათა სტრუქტურა უფრო ძლიერი გამხდარიყო.
თავდაპირველად ფირფიტა მოხრილი იყო სასურველ ზომად სხვადასხვა მონაკვეთში და შემდეგ ეს ნაწილები ერთმანეთთან შედუღდა სხეულის დასადგმელად. გამაძლიერებლები დაემატა, როგორც საყრდენი გამაგრების ზომები ნაჩვენებია სურათზე
ნაბიჯი 6: აქტივატორის შეკრება და ფირფიტის დამზადება



ამძრავები მზადდება v- სლოტ სისტემების გამოყენებით. ეს მართლაც იაფი და ადვილი ასაშენებელია, შეგიძლიათ ინტერნეტში გუგლით იკითხოთ, თუ როგორ უნდა ააწყოთ ერთი მათგანი. მე ვიყენებ ტყვიის ხრახნს ქამრის დრაივის ნაცვლად დატვირთვის ტევადობის გასაზრდელად. მე არ ჩავრთე ასამბლეის სახელმძღვანელო, რადგან ის შეიცვლება იმ დატვირთვის შესაბამისად, რომლის ტარებაც გსურთ. ჩემთვის მაქსიმალური დატვირთვა იყო დაახლოებით 14 კგ.
აქტივატორი ფირფიტა აგებულია frp ფურცლის გამოყენებით, აკრილის გამოყენებაც შესაძლებელია. უჟანგავი ფოლადის ჩარჩო აშენდა frp ფურცლის მხარდასაჭერად.
პედლის ჩარჩო
პედლის ჩარჩო დამზადებულია უჟანგავი ფოლადისგან. უჟანგავი ფოლადი წყალგაუმტარია და ამით გაუძლებს კოროზიას. პედლის ჩარჩოსთვის გამოყენებულია კვადრატული მონაკვეთი 2 x 2 სმ. მტკიცე ჩარჩო იყო საჭირო, რადგან ტალღების წარმოქმნისას ბევრი ციკლური დატვირთვა იქნება მოქმედი ბორბალზე. ფოლადის ჩარჩო არ იკეცება და, შესაბამისად, წარმოქმნის რეგულარულ სინუსოიდულ ტალღას.
შეიქმნა საბაჟო L-clamp, რომელიც აკავშირებდა გამტარუნარიან ფირფიტას განტლის ფირფიტასთან vslot სისტემაზე.
ნაბიჯი 7: ტალღის მახასიათებლების მანიპულაცია



ავზს შეუძლია წარმოქმნას სხვადასხვა ტალღის სიმაღლე მოთხოვნის შესაბამისად. სხვადასხვა ტალღის სიმაღლის შესაქმნელად ძრავის RPM რეგულირდება. დიდი ტალღის სიმაღლის მისაღებად ძრავის RPM იზრდება, ეს ასევე ამცირებს ტალღის ტალღის სიგრძეს. მცირდება ძრავის ტალღის სიგრძის RPM- ის გაზრდა. RPM- ის რეგულირება შესაძლებელია მენიუდან მორგებული RPM ვარიანტის არჩევით.
მაქსიმალური RPM = 250
მინიმალური RPM = 50
ქვემოთ მოცემულია სხვადასხვა ტალღის სიმაღლის მაგალითი, როგორც ეს აღწერილია ამაჩქარებლით. პირველი სურათი არის მონაცემები მაღალი RPM- ზე ჩაწერილი, რის შედეგადაც ჩვენ ვიღებთ მაღალი ტალღის სიმაღლეს. მეორე სურათი გვიჩვენებს ტალღის სიმაღლის შემცირებას და გრაფის ტალღის სიგრძის გაზრდას, რაც არის მონაცემები აქსელერომერტერის მიერ ჩაწერილი და წარმოადგენს წარმოქმნილი ტალღის რეალურ ტალღურ მახასიათებლებს.
ნაბიჯი 8: ელექტრონული კავშირები და პროგრამა

ელექტრომომარაგების შეერთებისას ფრთხილად იყავით კავშირის პოლარობა დააკავშირეთ პოზიტიური ტერმინალი დადებითთან და უარყოფითთან უარყოფითად. გააკეთეთ კავშირები ძრავასთან და დრაივერთან, როგორც ეს ნაჩვენებია სურათზე. მას შემდეგ, რაც ყველა კავშირი სათანადოდ არის დაკავშირებული მიკროკონტროლის ქინძისთავებთან (8, 9, 10 და 11) სტეპერიანი ძრავის მძღოლს. შეაერთეთ მიკროკონტროლი კომპიუტერთან USB- ით. დაიწყეთ Arduino IDE> სერიული მონიტორი.
პროგრამა შედის სამეურვეო პროგრამაში და არის თვითგამორკვეული, იგი იყენებს გადართვის შემთხვევას და სხვა შემთხვევაში განცხადებებს. მისი მართლაც მარტივი საშუალო სკოლის მოსწავლესაც შეუძლია მისი გაგება.
აქ არის პროგრამის Google Drive ბმული
არდუინოს კონტროლის პროგრამა
ნაბიჯი 9: აქტივატორების კონტროლი მენიუზე ორიენტირებული პროგრამით

მას შემდეგ, რაც მიკროკონტროლერი სწორად არის დაკავშირებული კომპიუტერთან, თქვენ გექნებათ მსგავსი მენიუ. ვარიანტის ასარჩევად, უბრალოდ ჩაწერეთ ნომერი ვარიანტის გვერდით და დააჭირეთ Enter- ს
მაგალითი:-
აირჩიეთ "გააქტიურება მაქსიმალური სიხშირით" ტიპი 1 და დააჭირეთ Enter.
მოქმედების შესაჩერებლად აკრიფეთ 0 და დააჭირეთ Enter.
გადაუდებელი გაჩერება
აქტივატორის შესაჩერებლად დააჭირეთ ნულს "0" და შეიყვანეთ.
გადაუდებელი მოქმედების შესაჩერებლად ან დააჭირეთ მიკროკონტროლერის გადატვირთვას, ან გამორთეთ კვების ბლოკი.
ნაბიჯი 10: როგორ ვიმუშაოთ ტალღის ავზი

ეს ტანკი გაკეთდა, როგორც ჩემი ძირითადი პროექტის ნაწილი. სატანკო შემოწმებულია მასშტაბური ბარჟის მოდელისათვის სხვადასხვა რეგულარული ტალღების წარმოქმნისათვის. ტალღის ნაკადის ტესტირება წარმატებული იყო. ამ პროექტის შემუშავების საერთო ღირებულება შეადგენდა რუბლს. 81, 000 (მხოლოდ ოთხმოცი ათასი) ორი თვის განმავლობაში.
ნებისმიერი კითხვისთვის გთხოვთ დაწეროთ კომენტარი.

პირველი პრიზი წყლის კონკურსში
გირჩევთ:
წვრილმანი ფუნქცია/ტალღის ფორმის გენერატორი: 6 ნაბიჯი (სურათებით)
")
წვრილმანი ფუნქცია/ტალღის ფორმის გენერატორი: ამ პროექტში ჩვენ მოკლედ შევხედავთ კომერციულ ფუნქციას/ტალღის გენერატორებს, რათა დავადგინოთ რა მახასიათებლებია მნიშვნელოვანი წვრილმანი ვერსიისთვის. ამის შემდეგ მე გაჩვენებთ თუ როგორ უნდა შექმნათ მარტივი ფუნქციის გენერატორი, ანალოგი და ციფრი
Arduino + Bluetooth კონტროლირებადი ავზი: 10 ნაბიჯი (სურათებით)
")
Arduino + Bluetooth კონტროლირებადი სატანკო: მე ვაშენებ ამ ავზს იმისთვის, რომ ვისწავლო პროგრამირება, როგორ მუშაობს ძრავები, სერვისები, Bluetooth და Arduino და ვაშენებ ერთს ინტერნეტიდან კვლევის საშუალებით. ახლა მე გადავწყვიტე, რომ გამეკეთებინა ჩემი ინსტრუქცია, იმ ადამიანებისთვის, ვისაც უნდა დაეხმაროს არდუინოს ავზის მშენებლობაში. აქ მე
უკაბელო არდუინოს კონტროლირებადი ავზი (nRF24L01): 6 ნაბიჯი (სურათებით)
: 6 ნაბიჯი (სურათებით)")
უკაბელო არდუინოს კონტროლირებადი სატანკო (nRF24L01): გამარჯობა, დღეს მე გაჩვენებ თუ როგორ უნდა ავაშენო არდუინოს კონტროლირებადი ავზი და დისტანციური მართვა. ტანკის 3D ნაბეჭდი ნაწილები (გარდა კონტროლერის, ტრეკის სახელმძღვანელოს და სატანკო საფარისა) შექმნილია timmiclark– ის მიერ და შეგიძლიათ იხილოთ აქ
ჟოლოს ავზი ვებ ინტერფეისით და ვიდეო სტრიმინგით: 8 ნაბიჯი (სურათებით)
")
ჟოლოს სატანკო ვებ ინტერფეისით და ვიდეო სტრიმინგით: ჩვენ ვაპირებთ ვნახოთ, როგორ გავაცნობიერე პატარა WiFi სატანკო, რომელსაც შეუძლია დისტანციური ვებ კონტროლი და ვიდეო სტრიმინგი. ეს გამიზნულია სასწავლო პროცესისთვის, რომელიც მოითხოვს ელექტრონული და პროგრამული პროგრამირების ძირითად ცოდნას. ამ მიზეზით მე ავირჩიე
წვრილმანი Betta (ან ნებისმიერი თევზის) ავზი USB LED ნათურით: 10 ნაბიჯი
 ავზი USB LED ნათურით: 10 ნაბიჯი")
წვრილმანი Betta (ან ნებისმიერი თევზი) სატანკო USB LED ნათურით: ჩემი პირველი ინსტრუქცია. მე აღმოვაჩინე მიმზიდველი ტკბილეულის ქილა, რომელიც იყიდება აქ KSA– ში, რომელიც კარგად გამოიყურება Betta სატანკო. USB– ით აღჭურვილი LED ნათურის ფუნქცია წარმოიშვა ხელოვნური ინტელექტისგან (https://www.instructables.com/id/The-USB-powered-LED-CD-lamp/?ALLST