")
Სარჩევი:
- ავტორი John Day day@howwhatproduce.com.
- Public 2024-01-30 10:20.
- ბოლოს შეცვლილი 2025-06-01 06:09.

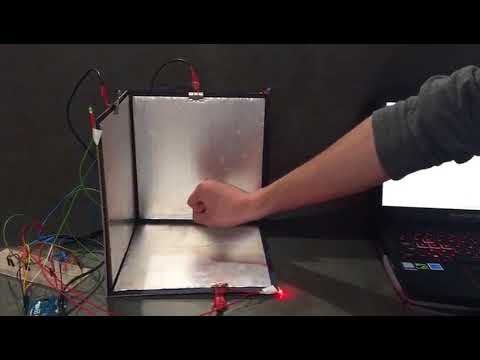

ამ ინსტრუქციაში განმარტებულია, თუ როგორ შეიძლება ხელის მოძრაობის თვალყურის დევნება 3D სივრცეში capacitive sensing პრინციპით. ალუმინის დამუხტულ კილიტასა და თქვენს ხელებს შორის მანძილის შეცვლით, კონდენსატორის სიმძლავრე იცვლება. ეს მეთოდი შეიძლება გამოყენებულ იქნას როგორც დაბალი დონის ალტერნატივა ინერციულ და ოპტიკურ სისტემებზე 3D სივრცეში მოძრაობის დასადგენად. ამ პროტოტიპში ჩვენ დავამატეთ LED- ები, რომლებიც ანათებენ, როდესაც ობიექტი ძალიან ახლოს მიდის ალუმინის კილიტაზე.
ნაბიჯი 1: საჭირო ინსტრუმენტები და მასალები
- 3x 270k Ohm რეზისტორი
- 3x 10k Ohm რეზისტორი
- 3x ალიგატორის კლიპი
- 1x წითელი LED
- 1x ლურჯი LED
- 1x მწვანე LED
- 3x 220 Ohm რეზისტორი
- ჯარისკაცი
- სითბოს შემცირება
- ფარის კაბელი
- არდუინო უნო
- ალუმინის კილიტა
- მუყაო
- Ფირზე
- სპრეის წებო
- პურის დაფა
- დამაკავშირებელი მავთულები (სხვადასხვა სიგრძე)
ნაბიჯი 2: ჩარჩოს შექმნა




ამოიღეთ მუყაოს სამი კვადრატული ნაჭერი (250x250 მმ) და სამი კვადრატული ალუმინის კილიტა (230x230 მმ). წაისვით სპრეის წებო ალუმინის ფოლგის ერთ მხარეს და თითოეული წაისვით მუყაოს ნაჭრებზე. ამ პროტოტიპში ალუმინის კილიტა იმოქმედებს როგორც ჩვენი ტევადობის სენსორები. ამიტომ დარწმუნდით, რომ საკმარისი სივრცეა ალუმინის კილიტასა და მუყაოს საზღვარს შორის, ასე რომ ჩარჩოს შეკრებისთანავე არ იქნება კონტაქტი ფოლგის სხვადასხვა ფურცლებს შორის. მას შემდეგ, რაც კილიტა გამოიყენება მუყაოზე, დროა შეაგროვოთ მუყაოს სამი ნაჭერი ფირის გამოყენებით, რათა დაასრულოთ ჩარჩო. კიდევ ერთხელ, დარწმუნდით, რომ არ არსებობს კონტაქტი ალუმინის კილიტის სხვადასხვა ფურცლებს შორის.
ნაბიჯი 3: ფარის მავთულის გაყვანილობა ფირფიტაზე და არდუინოზე



მნიშვნელოვანია გამოიყენოთ დაფარული კაბელი, რათა დააკავშიროთ კილიტა წრედ. ნორმალური კაბელების გამოყენება გამოიმუშავებს ანტენის ეფექტს და ხელს შეუშლის თქვენი სენსორის კითხვას. დარწმუნდით, რომ გაქვთ 3 დაფარული კაბელი, რომლის სიგრძეა დაახლოებით 50 სმ. აიღეთ ერთი კაბელი, ჩამოაცალეთ მავთული, გათიშეთ დამცავი მავთულები და გამოიყენეთ მხოლოდ შიდა მავთული, რომ დააკავშიროთ იგი მავთულის ალიგატორის სამაგრზე შედუღებით. დარწმუნდით, რომ გამოიყენეთ სითბოს შემცირება დასაფარავად solder კავშირი. ალიგატორის სამაგრები დააჭერით ალუმინის კილიტაზე.
შეაერთეთ ყველა ფარის მავთული თქვენი დაფის პოზიტიურ რიგში. შემდეგ დაუკავშირეთ ეს პოზიტიური რიგი თქვენს არდუინოს 5 ვ კავშირს. ახლა აიღეთ ძირითადი მავთული ფარის კაბელიდან და შეაერთეთ 10k Ohm და 220k Ohm რეზისტორი პარალელურად. შეაერთეთ ეს თქვენი Arduino- ს გამომავალ პორტთან (ჩვენ ვიყენებდით 8, 9 და 10).
გაიმეორეთ ეს ნაბიჯი კიდევ 2 -ჯერ პროტოტიპის სხვა თვითმფრინავებისთვის.
ნაბიჯი 4: LED- ების გაყვანილობა




შეაერთეთ LED- ების ბოლოები გრძელ მავთულზე ისე, რომ არდუინოს დაფისგან მიაღწიოს შესაბამისი ფირფიტების კუთხეებს.
ჩვენ გამოვიყენეთ 2, 3 და 4 ქინძისთავები, როგორც ჩვენი LED- ების გამომავალი ქინძისთავები. ეს გამომავალი დაკავშირებულია breadboard- თან და უკავშირდება LED- ის პოზიტიურ ფეხს. LED- ის უარყოფითი ფეხი შემდეგ უკავშირდება 330 Ohm რეზისტორს. რეზისტორის მეორე ბოლო უკავშირდება პურის დაფის მიწას, რომელიც უკავშირდება არდუინოს მიწას. გაიმეორეთ ეს სამივე LED- ისთვის. ჩვენს პროტოტიპში ლურჯი LED უკავშირდება Y- სიბრტყეს, წითელი LED Z- სიბრტყეს და მწვანე LED- ს X- სიბრტყეს. მიამაგრეთ LED- ები შესაბამის თვითმფრინავებზე, რომ მიიღოთ პირდაპირი კავშირი პროტოტიპის გამოყენებისას.
თუ თქვენ არ იყენებთ პურის დაფას და გსურთ ფარის კაბელი დაუკავშიროთ უშუალოდ არდუინოს, შეგიძლიათ ნახოთ თანდართული სურათი გამაგრების კავშირების ლამაზი მიმოხილვისთვის. თქვენი საბოლოო კავშირები უნდა გამოიყურებოდეს მიმოხილვის სურათზე.
ნაბიჯი 5: კოდირება
დანართში ჩვენ განვათავსეთ კოდი, რომელიც გამოვიყენეთ ამ ექსპერიმენტისთვის. დამატებითი ინფორმაციისთვის, თითოეული ძირითადი ბრძანების შემდეგ იდება კომენტარი, რომელიც განმარტავს რა ხდება კოდში. გახსენით კოდი თქვენს Arduino პროგრამულ უზრუნველყოფაში თქვენს კომპიუტერში და ატვირთეთ იგი თქვენს Arduino- ში. თუ თქვენ იყენებთ ლეპტოპს, დარწმუნდით, რომ ის იტენება; წინააღმდეგ შემთხვევაში თქვენი პროტოტიპი არ იმუშავებს.
ნაბიჯი 6: პროტოტიპის გამოყენება
3D მოძრაობის თვალთვალის ეს გზა ძალიან მგრძნობიარეა მიმდებარე ცვლადებისთვის. ამიტომ დარწმუნდით, რომ კალიბრირებული ღირებულებების დაკალიბრება საკუთარ სიტუაციაში. თქვენ შეგიძლიათ უბრალოდ გამოიყენოთ სერიული მონიტორი სწორი მნიშვნელობების მისაღებად. რჩევა: თქვენ შეგიძლიათ შექმნათ კალიბრაცია დამოუკიდებლად, სადაც ის იღებს საშუალო მნიშვნელობებს + 10 % კოდის გაშვებისას. ვიდეოში ნაჩვენებია თუ როგორ უნდა მუშაობდეს პროტოტიპი სწორად.
გირჩევთ:
2x 48V 5A Bench Top Power Supply: 7 Steps (ერთად სურათები)
")
2x 48V 5A Bench Top Power Supply: ეს არის სამეურვეო სკამზე დენის წყაროს აწყობის ინსტრუქცია. ნუ ელოდებით ელექტრონიკის განვითარებას ან უამრავ შედუღებას, მე უბრალოდ შევუკვეთე ნაწილები AliExpress– დან და ჩავდე ყუთში. გთხოვთ გაუფრთხილდეთ, რომ მე გავაკეთე მცირე ცვლილებები საზოგადოებაში
როგორ გააკეთოთ საკუთარი ოპერაციული სისტემა! (სურათები და მაგალითი შიგნით): 5 ნაბიჯი
: 5 ნაბიჯი")
როგორ გააკეთოთ საკუთარი ოპერაციული სისტემა! (სურათები და მაგალითი შიგნით): გააკეთე ახლავე
DIY Smart Robot Tracking Car Kits Tracking Car Photosensitive: 7 Steps

DIY Smart Robot Tracking Car Kits Tracking Car Photosensitive: Design by SINONING ROBOT თქვენ შეგიძლიათ შეიძინოთ რობოტი ავტომობილის თვალთვალისგან TheoryLM393 ჩიპი შეადარეთ ორ ფოტორეზისტორს, როდესაც ერთ მხარეს არის ფოტორეზისტორი LED თეთრზე, ძრავის გვერდი მაშინვე გაჩერდება, ძრავის მეორე მხარე დაიძაბება ისე, რომ
უმარტივესი ვებკამერა, როგორც უსაფრთხოების კამერა - მოძრაობის ამოცნობა და ელექტრონული ფოსტით გადაღებული სურათები: 4 ნაბიჯი

უმარტივესი ვებკამერა, როგორც უსაფრთხოების კამერა - მოძრაობის გამოვლენა და ელექტრონული ფოსტით გადაღებული სურათები: თქვენ აღარ გჭირდებათ პროგრამული უზრუნველყოფის გადმოტვირთვა ან კონფიგურაცია, რომ მიიღოთ თქვენი ვებკამერიდან ელ.წერილზე მოძრავი სურათები - გამოიყენეთ ბრაუზერი. გამოიყენეთ უახლესი Firefox, Chrome, Edge ან Opera ბრაუზერი Windows- ზე, Mac- ზე ან Android- ზე სურათის გადასაღებად
განათების სურათები: 7 ნაბიჯი

განათების სურათები: გამარჯობათ შემქმნელებო! ჩვენ ვართ ალვარო ველასკესი, ოსკარ ბარიოსი და გილერმო მონტორო, სამი სტუდენტის ჯგუფი "შემოქმედებითი ელექტრონიკა", ელექტრონიკის ინჟინერიის მეოთხე კურსის მოდული მალაგას უნივერსიტეტში, ტელეკომუნიკაციების სკოლა. (http://www.uma.es/et