
Სარჩევი:
- ავტორი John Day day@howwhatproduce.com.
- Public 2024-01-30 10:18.
- ბოლოს შეცვლილი 2025-06-01 06:09.

რამდენიმე ხნის წინ გამოვაქვეყნე ჩემი Wifi PPM კონტროლერი. საკმაოდ კარგად მუშაობს. უბრალოდ დიაპაზონი ცოტა მოკლეა. მე ვიპოვე ამ პრობლემის გადაწყვეტა. ESP8266 მხარს უჭერს რეჟიმს სახელწოდებით ESPNOW. ეს რეჟიმი გაცილებით დაბალი დონეა. ეს არ წყვეტს კავშირს ასე მარტივად და თუ ის წყვეტს კავშირს მაშინვე ხელახლა უკავშირდება.
მე ვიყენებ სამ ESP8266- ს. ერთი არის ESPNOW მიმღები, მეორე არის ESPNOW გამგზავნი და მესამე არის წვდომის წერტილი, რომელთანაც შეგიძლიათ დაკავშირება. მესამე საჭიროა, რადგან ESPNOW გამგზავნი არ შეიძლება იყოს ერთდროულად წვდომის წერტილი. მე ასევე დავამატე რამდენიმე ანტენა უკეთესი დიაპაზონის მისაღებად.
არის მეორე წვდომის წერტილი პირდაპირ მიმღებთან. თუ ამას დაუკავშირდებით, იგივე გექნებათ, რაც ძველ WifiPPM პროექტთან ერთად.
მე ასევე დავამატე MSP პროტოკოლის მიმღების მხარდაჭერა. ეს არის "MultiWii სერიული პროტოკოლი", რომელსაც მხარს უჭერს MultiWii, Betaflight, Cleanflight და მრავალი სხვა ფრენის კონტროლერი.
ნაბიჯი 1: ნაწილების სია




თქვენ გჭირდებათ სამი სახის ESP8266 მოდული. მაგრამ შენ გინდა საუკეთესო დიაპაზონი. ამიტომ მე გირჩევთ გამოიყენოთ ESP8266 მოდულები ანტენებით. ის ასევე მუშაობს ანტენის გარეშე. მე ვიყენებ შემდეგ ნაწილებს:
2 x ESP07 (ESP8266 მოდული ანტენის კონექტორით)
1 x ESP12
1 x 3dBi Mini Antenne I-PEX U. FL IPX მიმღების მხარეს
1 x ESP8266 2, 4 /5 GHz 3dbi Wlan Wifi Antenne SMA Stecker / მამრობითი + I-PEX ადაპტერი გამგზავნის მხარეს
3, 3 V კვების წყარო ყველა ESP8266 მოდულისთვის
თქვენ ასევე გჭირდებათ კომპიუტერი Arduino IDE- ით: https://www.arduino.cc/en/Main/SoftwareESP8266 მხარდაჭერა Arduino IDE- სთვის. მიჰყევით ამ ინსტრუქციას: https://learn.sparkfun.com/tutorials/esp8266-thin… ვებსაიტის ბიბლიოთეკა Arduino- სთვის:
ნაბიჯი 2: ჩამოტვირთეთ და გაუშვით ესკიზები



თქვენ შეგიძლიათ ჩამოტვირთოთ ესკიზები აქ.
გახსენით ფაილი. არსებობს სამი საქაღალდე: Master-AP, Sender, Receiver
Master-AP: ეს არის ესკიზი წვდომის წერტილისთვის. გახსენით ესკიზი arduino IDE- ით. ინსტრუმენტების მენიუში დააყენეთ პროცესორის სიხშირე 160 MHz და ატვირთეთ ესკიზი ESP12- ში.
გამგზავნი: ეს არის ესკიზი MSPNOW გამგზავნისთვის. დააყენეთ პროცესორის სიხშირე 160 MHz და ატვირთეთ იგი ერთ -ერთ ESP07- ზე.
თქვენ შეგიძლიათ ნახოთ პირველ სურათზე როგორ დააკავშიროთ ESP8266 მოდული ციმციმისთვის.
ახლა დააკავშირეთ ESP12 (წვდომის წერტილი) და გამგზავნი ESP07 სერიული პორტები და დენის კავშირები (მეორე სურათი): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
დაიწყეთ ორივე მოდული და დაუკავშირდით წვდომის წერტილს "Long-Range-WifiPPM/MSP". პაროლი არის "WifiPPM/MSP"
გახსენით ბრაუზერი და გახსენით IP მისამართი 192.168.4.1. გამოჩნდება საკონტროლო ვებ გვერდი. დააწკაპუნეთ ღილაკზე "Wifi Info". გამოჩნდება შეტყობინების ყუთი გამგზავნის MAC და მიმღები MAC.
გახსენით მიმღების ესკიზი Arduino IDE- ში. შეცვალეთ ხაზი "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (მესამე სურათი) გამგზავნის Mac მისამართზე, რომელიც ნაჩვენებია ვებგვერდზე. მიმღები Mac უნდა იყოს ნორმალური. დარწმუნდით, რომ პროცესორის სიხშირე არის 160 MHz და ატვირთეთ ესკიზი მეორე ESP05- ზე.
ნაბიჯი 3: დააკავშირეთ მიმღები ფრენის კონტროლერთან და დააინსტალირეთ სუფთა ფრენა



შეაერთეთ ახლა მიმღები ფრენის კონტროლერთან. თქვენს ფრენის კონტროლერს უნდა ჰქონდეს 3, 3 ვოლტიანი სიმძლავრე მინიმუმ 200 mA. თუ არა, თქვენ გჭირდებათ დამატებითი 3, 3V ძაბვის რეგულატორი.
შეაერთეთ GSP ESP ფრენის კონტროლერის GND- თან. შეაერთეთ ESP VCC ფრენის კონტროლერის 3, 3V ან დამატებითი 3, 3V ძაბვის რეგულატორთან.
თქვენ შეგიძლიათ გამოიყენოთ PPM გამომავალი ან სერიული MSP გამომავალი.
MSP გამომავლისთვის დააკავშირეთ ESP8266- ის TX თქვენი ფრენის კონტროლერის ნებისმიერი სერიული პორტის RX- თან. (სურათი 1)
PPM გამოყვანისთვის დააკავშირეთ ESP8266- ის GPIO5 ფრენის კონტროლერის PPM შეყვანასთან. (სურათი 1)
ESP- ის გაყვანილობის შემდეგ დაიწყეთ ფრენის კონტროლერი და გახსენით სუფთა ფრენა. დაუკავშირდით თქვენს მობილურ ტელეფონს "WifiPPM/MSP" წვდომის წერტილს. პაროლი არის "WifiPPM/MSP"
MSP- სთვის: გახსენით პორტების ჩანართი და დააყენეთ MSP სერიულ პორტში, რომელთანაც დააკავშირეთ ESP8266 (სურათი 2). შეინახეთ და გადატვირთეთ. გადადით კონფიგურაციის ჩანართზე და დააყენეთ მიმღები "MSP სერიული მიმღები" (სურათი 3). შეინახეთ და გადატვირთეთ.
PPM- სთვის: წაიკითხეთ თქვენი ფრენის კონტროლერის სახელმძღვანელოში, თუ როგორ უნდა დააყენოთ PPMGo კონფიგურაციის ჩანართზე და მიმღები დააყენოთ „PPM მიმღებად“(სურათი 4). შეინახეთ და გადატვირთეთ.
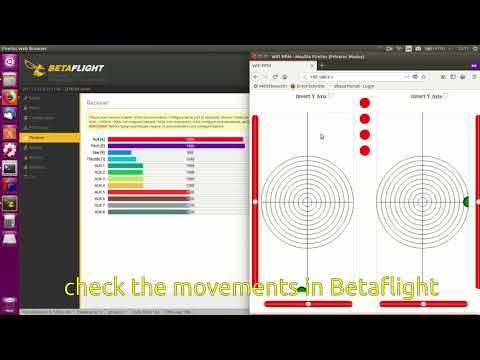
შემდეგი დაყენება ორივე მიმღებისთვის ერთნაირია: გადადით მიმღების ჩანართზე. დააყენეთ არხები "RTAE1234" (სურათი 5/ვიდეო). შეინახეთ კონფიგურაცია.
ახლა გახსენით ბრაუზერი თქვენს სმარტფონში. გახსენით საიტი 192.168.4.1 (სურათი 6). ახლა თქვენ შეგიძლიათ შეამოწმოთ კონტროლერი.
თუ ის მუშაობს, დაიწყეთ ორი გამომგზავნი ESP8266. დაუკავშირდით "Long Range WifiPPM/MSP" წვდომის წერტილს. პაროლი არის "WifiPPM/MSP". კვლავ გახსენით ვებ გვერდი 192.168.4.1. კვლავ შეამოწმეთ სუფთა ფრენის დროს, მუშაობს თუ არა.
შეაერთეთ ანტენები ESP07 მოდულებთან.
ნაბიჯი 4: კიდევ რამდენიმე ინფორმაცია

ნორმალურ მუშაობაში არის ორი წვდომის წერტილი. "WifiPPM/MSP" წვდომის წერტილი ჰგავს წინა WifiPPM პროექტს. თქვენ შეგიძლიათ გამოიყენოთ ის, თუ უბრალოდ გსურთ სწრაფი ფრენის გაკეთება დამატებითი მოდულების შეერთების გარეშე, როდესაც არ გჭირდებათ შორ მანძილზე კავშირი. თუ დაუკავშირდებით "Long Range WifiPPM/MSP" - ს, გრძელი დისტანციის კონტროლერი იღებს კონტროლს.
იქნებ გინდათ იცოდეთ რამდენი ხანია "შორი მანძილი". სინამდვილეში მე ნამდვილად არ ვიცი. ეს სულ მცირე რამდენიმე ასეული მეტრია. მაგრამ აქამდე ვერ შევძელი მისი გამოცდა. ის არ წყვეტს კავშირს ჩემს სრულ ბინაში.
მე დავამატე MSP კონტროლი, რადგან ვიფიქრე, რომ მე შემიძლია ტელემეტრიული მონაცემების უკანა არხის შექმნა. მაგრამ ეს არასოდეს მუშაობდა სტაბილურად. ყოველ შემთხვევაში, MSP პროტოკოლი უფრო ზუსტია ვიდრე ppm, რადგან ის არ არის დამოკიდებული დროზე იმდენად. შესაძლოა ეს პრობლემებს უქმნის ნელი ფრენის კონტროლერებს, რადგან სერიულ პორტზე დიდი ტრაფიკია. ჩემი Noxe F4 ფრენის კონტროლერთან მუშაობს უპრობლემოდ.
თუ რაიმე კონფიგურაციის პრობლემა გაქვთ, გადახედეთ ძველ WifiPPM პროექტს.
გირჩევთ:
ეკგ ლოგერი - ტარებადი გულის მონიტორი მონაცემთა გრძელვადიანი მოპოვებისა და ანალიზისათვის: 3 ნაბიჯი

ეკგ ლოგერი - ტარებადი კარდიო მონიტორი მონაცემთა გრძელვადიანი შეძენისა და ანალიზისათვის: პირველი გამოშვება: ოქტომბერი 2017 უახლესი ვერსია: 1.6.0 სტატუსი: სტაბილური სირთულე: მაღალი წინაპირობა: Arduino, პროგრამირება, აპარატურის მშენებლობა უნიკალური საცავი: SF (იხილეთ ბმულები ქვემოთ) მხარდაჭერა: მხოლოდ ფორუმი, არა PMECG Logger არის ტარებადი გულის მონიტორი დიდხანს
ThingSpeak, ESP32 და გრძელვადიანი უკაბელო ტემპერატურა და ტენიანობა: 5 ნაბიჯი

ThingSpeak, ESP32 და Long Range Wireless Temp and Humidity: ამ გაკვეთილში ჩვენ გავზომავთ ტემპერატურისა და ტენიანობის სხვადასხვა მონაცემებს Temp და ტენიანობის სენსორის გამოყენებით. თქვენ ასევე ისწავლით თუ როგორ უნდა გაგზავნოთ ეს მონაცემები ThingSpeak– ში. ასე რომ თქვენ შეგიძლიათ გაანალიზოთ იგი ნებისმიერი ადგილიდან სხვადასხვა პროგრამებისთვის
Wifi PPM (აპლიკაცია არ არის საჭირო): 4 ნაბიჯი (სურათებით)
: 4 ნაბიჯი (სურათებით)")
Wifi PPM (აპლიკაცია არ არის საჭირო): მე მინდოდა ჩემი ჭკვიანი ტელეფონის კონტროლი ჩემი წვრილი მიკრო შიდა quadrocopter– ით, მაგრამ მე ვერ ვიპოვე ამის კარგი გამოსავალი. მე მქონდა რამდენიმე ESP8266 wifi მოდული, ასე რომ მე გადავწყვიტე გამეკეთებინა საკუთარი თავი. პროგრამა იწყებს wifi წვდომის წერტილს HTML– ით
წვრილმანი უფრო ეფექტური გრძელვადიანი USB ან ნებისმიერი დამტენი: 6 ნაბიჯი

წვრილმანი უფრო ეფექტური გრძელვადიანი USB ან ნებისმიერი დამტენი: ამ სახელმძღვანელოში მე გაგიმხელთ ერთ-ერთი ყველაზე ეფექტური გრძელვადიანი USB დამტენის დამზადებაში. ამ დროისთვის არსებობს ორი ტიპის დამტენი. პირველი დამტენი იღებს უფრო მაღალ ძაბვას და ამცირებს ძაბვას სითბოს წარმოქმნით, მე
სუპერ პორტატული, სუპერ ხმამაღალი, გრძელვადიანი, ბატარეაზე მომუშავე დინამიკები: 9 ნაბიჯი (სურათებით)
")
სუპერ პორტატული, სუპერ ხმამაღალი, გრძელვადიანი, ბატარეაზე მომუშავე დინამიკები: ოდესმე მინდოდა ჰქონოდა მძლავრი დინამიკის სისტემა იმ ბაღის წვეულებების/საველე რეფებისთვის. ბევრი იტყვის, რომ ეს არის ზედმეტი ინსტრუქტაჟი, რადგან არსებობს ბევრი ბუმბოქსის სტილის რადიოები იაფად გასული დღეებიდან, ან ეს იაფი აიპოდ სტილი mp3 დ